6.25
Let the line joining the pivot to the mass make an angle with the rod of length .
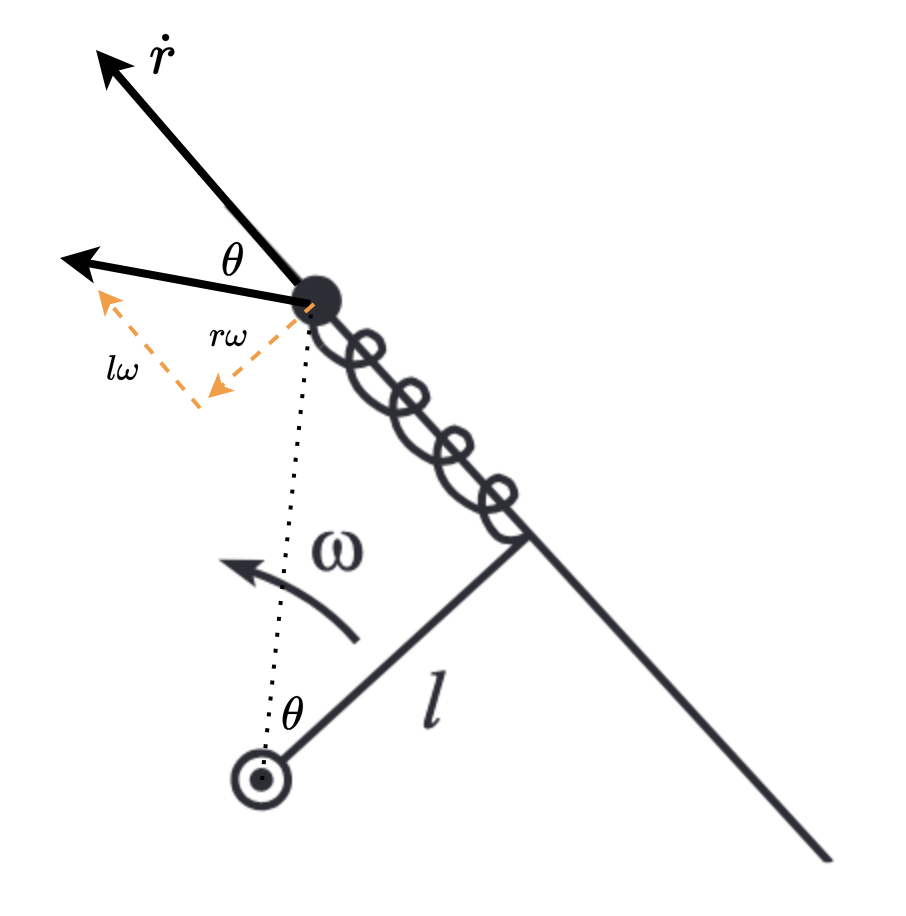
The components of the velocity of the mass along the rod and perpendicular to the rod will be and respectively. Thus, the kinetic energy of the mass is
Thus, the Lagrangian is
The E-L equations yield
This linear differential equation describes different kinds of motion for different :
Thus, the special value of is , since this is the angular velocity at which the spring and centrifugal force exactly counteract each other.
6.33
From , we have
Making copious use of the chain rule, we have
At , .
6.37
The constraint relation is
On differentiating twice, we get
Plugging in the expressions for and in terms of , we get
We now make the following substitutions:
Note
The second derivative supplied in the question is obtained on differentiating the first derivative before multiplying though by . I do not know why Morin prefers this, as the alternative yields a much cleaner equation to work with.
6.40
This system has two degrees of freedom. We will use and as our coordinates for the system. It is evident from the diagram that
The Lagrangian is
for some constant . This simplifies to
Consider the transformations
and are not affected by these transformations, and remains unchanged under them. Thus, this transformation constitutes a symmetry of , with and . It follows from Noether’s theorem that
is the corresponding conserved momentum.
6.45
Let be the position of the center of the ring, and let be the angle makes along the loop with the vertical. The velocity of in the ground frame will be
since the tangential velocity of the wheel does not affect the bead in any way. The Lagrangian of the system is
for some . I’ve been unable to justify this, but applying the second order approximation for the first term but not for the second gives us the coupled oscillator equations we are after:
Now, let the solution be of the form
Then, the coupled equations can be represented in matrix form as
Setting the determinant of the matrix to yields
If , the normal mode is ( must be , but is unrestricted).
If , the normal mode is .
Thus, the solution is