Problem 1.4
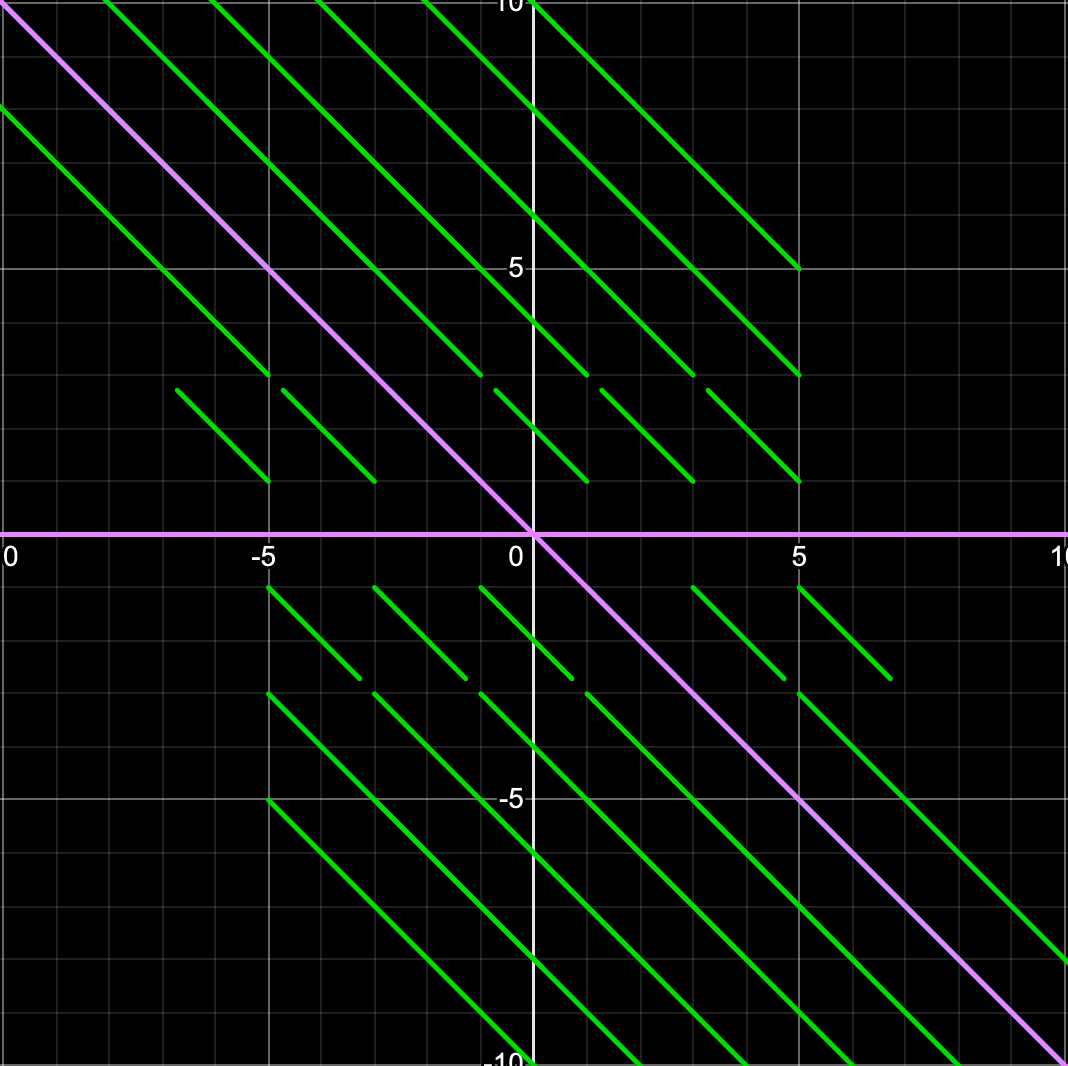
For uncoupled systems of the form where , the solution is obtained by solving each of the uncoupled equations separately:
Therefore, as for all when for all .
This solution is unique, since the solution is unique for each equation in the system ( is constant).
Problem 1.1
Part a

Part b

Part c

Part d
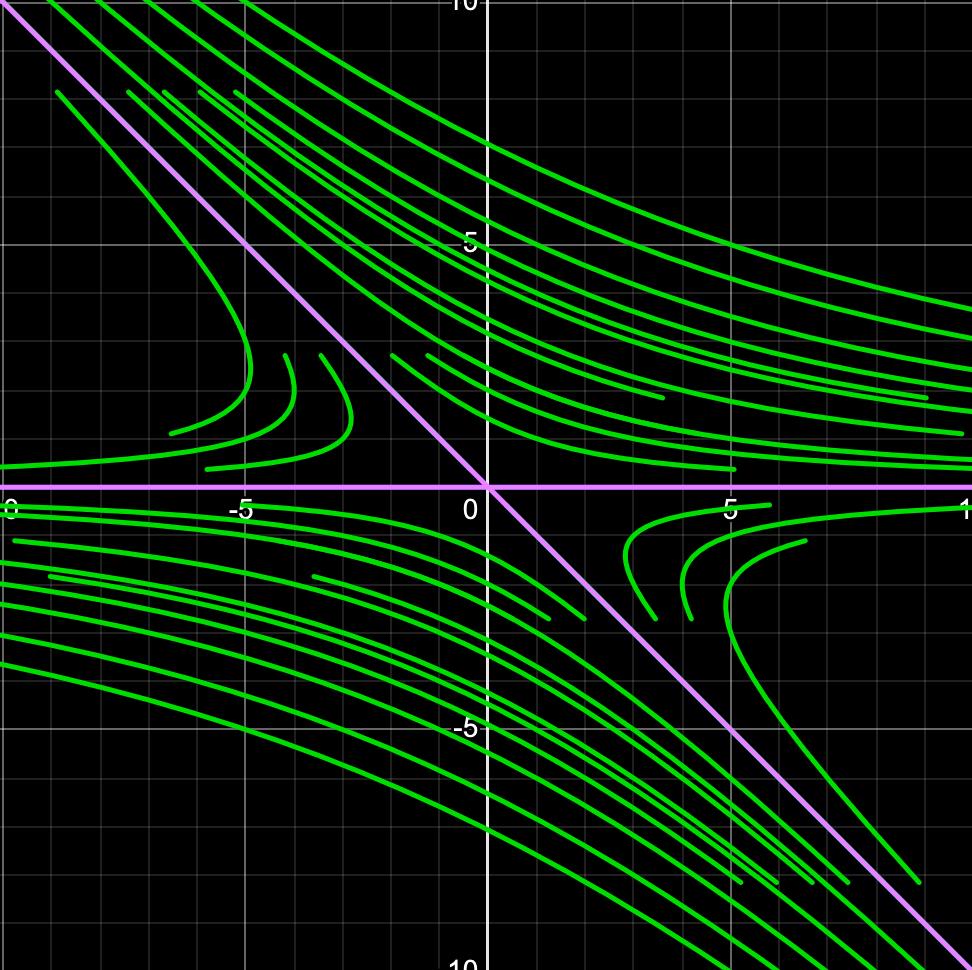
The system yields the differential equation . Using an exponential ansatz of , we see that . Thus, a general solution has the form
For the solution to be real, and are forced to be conjugates. Let . Then,
where and have been renamed and .
It follows that
Note that is constant for a given solution curve, making it a circle.

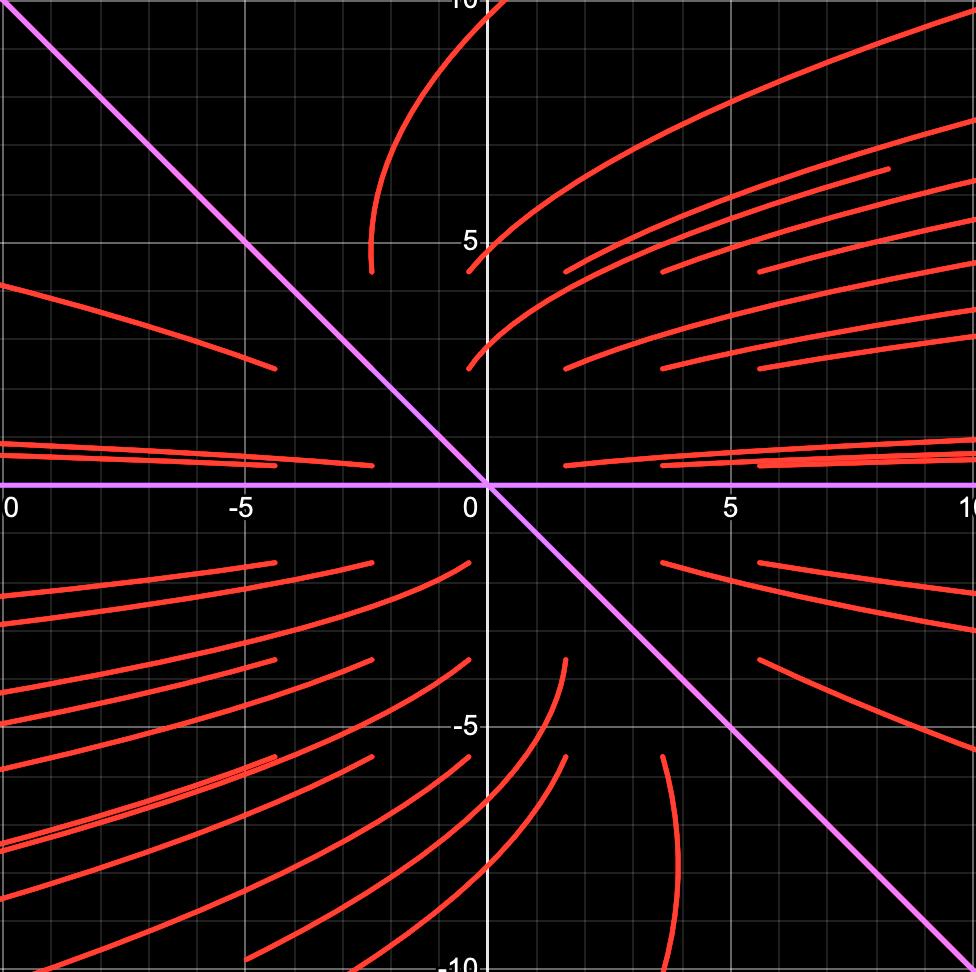
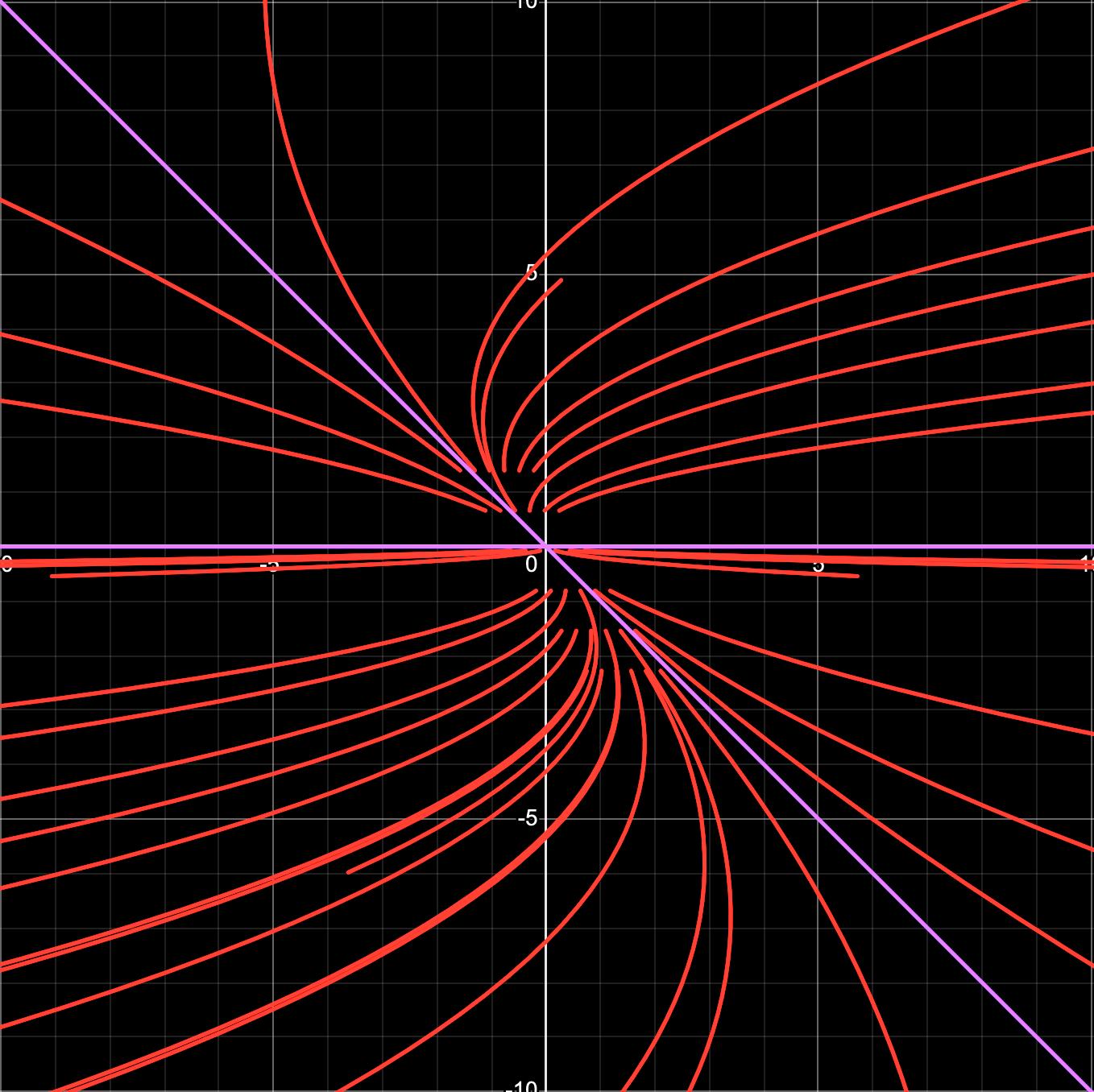
Part e
On finding , we obtain a first order linear differential equation
Applying the standard formula, we have and
For ,
is constant for a given solution curve. For ,
is constant. For , the solution is parameterized by .

Problem 1.2
Part a

Part b

The plane is the stable subspace. The axis is the unstable subspace.
Part c
Observe that are uncoupled form . Using previous work from Problem 1.1, part d, we have

Clearly, the axis is the stable subspace.
Problem 2.6
Let be the real, distinct eigenvalues of , with corresponding eigenvectors . Then, has the solution
where and . Thus,
For fixed , is a linear map between finite dimensional vector spaces, and hence is continuous.
Problem 2.7
Part a
Let , . We have

Part b
Let , .
Part c
Let , .
Part d
Let , .
Part e
Let , .
(lines are directed the opposite way!)
Part f
Let , .
Problem 3.1
Part a
. We need maximize subject to the constraint .
the maximum value of which is clearly . Thus, .
Part b
We need to maximize subject to the constraint .
Plug , , where . We now need to maximize .
The zeroes of are . Of these, and , correspond to local maxima, and the values of at these points are equal. Thus,
Part c
We need to maximize subject to the constraint . Again, let , and .
Let .
The zeroes of are
Of these, correspond to local maxima. Again, the values of at these points are equal. Thus,